Kompasleer
-
ferryvaneeuwen
- Berichten: 2676
- Lid geworden op: 25 nov 2004 22:59
- Locatie: Krimpen a/d IJssel
- Contacteer:
Octans
Hallo Joop,
Het apparaat heet volgens mij Octans. Het is inderdaad een Fiber Optic Gyro (FOG) voor onderwatergebruik tot 3000 meter. Het is een zeer nauwkeurig gyrokompas met daarbij nog een uitgebreide bewegingsdetector.
http://www.oceanscan.net/db_documents/OCTANSGYRO.PDF
Ik vermoed dat het apparaat aan de tunnelbakken bevestigd wordt en mee afgezonken wordt. Zo kan onderwater heel nauwkeurig de richting en snelheid over de grond van de tunnelbak bepaald worden en dat is in stromend water natuurlijk nooit weg.
Ferry
Het apparaat heet volgens mij Octans. Het is inderdaad een Fiber Optic Gyro (FOG) voor onderwatergebruik tot 3000 meter. Het is een zeer nauwkeurig gyrokompas met daarbij nog een uitgebreide bewegingsdetector.
http://www.oceanscan.net/db_documents/OCTANSGYRO.PDF
Ik vermoed dat het apparaat aan de tunnelbakken bevestigd wordt en mee afgezonken wordt. Zo kan onderwater heel nauwkeurig de richting en snelheid over de grond van de tunnelbak bepaald worden en dat is in stromend water natuurlijk nooit weg.
Ferry
-
Kapitein Rooibos
Het zal wel een beetje van beiden zijn.
De richting waarin je die tunnelstukken legt is natuurlijk erg belangrijk. Een GPS systeem kan alleen een richting bepalen als je ook een snelheid hebt, tenzij je van meerdere GPS ontvangers gebruik maakt en het dan uitrekent. Maar dan zit je inderdaad met een vrij grote fouten marge. Dus dan is zo'n laser apparaat natuurlijk veel beter.
De richting waarin je die tunnelstukken legt is natuurlijk erg belangrijk. Een GPS systeem kan alleen een richting bepalen als je ook een snelheid hebt, tenzij je van meerdere GPS ontvangers gebruik maakt en het dan uitrekent. Maar dan zit je inderdaad met een vrij grote fouten marge. Dus dan is zo'n laser apparaat natuurlijk veel beter.
-
ferryvaneeuwen
- Berichten: 2676
- Lid geworden op: 25 nov 2004 22:59
- Locatie: Krimpen a/d IJssel
- Contacteer:
Octans
De nauwkeurigheid van het GPS-systeem is onvoldoende voor dit soort projecten, althans de nauwkeurigheid die ons gegund is door de Amerikaanse overheid. Voor boven water zullen misschien wel de zeer nauwkeurige landmeetmethoden worden toegepast.
Verdwijnen de tunnelbakken onder water dan worden ze een prooi van stroom, stromingen of wervelingen en wordt het een heel ander verhaal. Het Octans-systeem is dan een uitkomst denk ik. Door de extra ingebouwde bewegingsdetector die zaken zoals Roll, Pitch, Surge, Sway, Heave, Speeds en Accelerations vrij exact aangeeft wordt het een soort navigatiesysteem. Voor een nauwkeurige line-up van de tunnelsegmenten is de FOG natuurlijk een ideaal apparaat.
Ferry
Nog even een weetje: Het gyrokompas werd voor het eerst gepatenteerd in 1885 door de Nederlander Marinus Gerardus van den Bos!
Verdwijnen de tunnelbakken onder water dan worden ze een prooi van stroom, stromingen of wervelingen en wordt het een heel ander verhaal. Het Octans-systeem is dan een uitkomst denk ik. Door de extra ingebouwde bewegingsdetector die zaken zoals Roll, Pitch, Surge, Sway, Heave, Speeds en Accelerations vrij exact aangeeft wordt het een soort navigatiesysteem. Voor een nauwkeurige line-up van de tunnelsegmenten is de FOG natuurlijk een ideaal apparaat.
Ferry
Nog even een weetje: Het gyrokompas werd voor het eerst gepatenteerd in 1885 door de Nederlander Marinus Gerardus van den Bos!
-
ferryvaneeuwen
- Berichten: 2676
- Lid geworden op: 25 nov 2004 22:59
- Locatie: Krimpen a/d IJssel
- Contacteer:
DP
Hallo Joop,
Ooit, begin 70-er jaren was ik betrokken bij de inbedrijfstelling van het dynamic positioning systeem van Alcatel op de DP boorschepen Pelican en Havdrill die door de werf Gusto in Schiedam gebouwd werden. Dat was weer eens iets anders dan een radiostation of radar in bedrijfstellen!
In die tijd werd de positie van dit soort DP-schepen verkregen door continue metingen van akoestische transponders die rond de wellhead in een vijfhoek (pentagoon) op de zeebodem geplaatst werden. Afwijkingen van het hart van de vijfhoek werden gecorrigeerd door de drie voorwaartse geplaatste thrusters, twee achterwaartse geplaatste thrusters alsmede ook de twee voorstuwingsschroeven te regelen. De juiste dosering van de krachten van de thrusters en schroeven om het schip op zijn plaats te houden werd door de computer berekend en door middel van de variable pitch op de juiste waarde ingesteld.
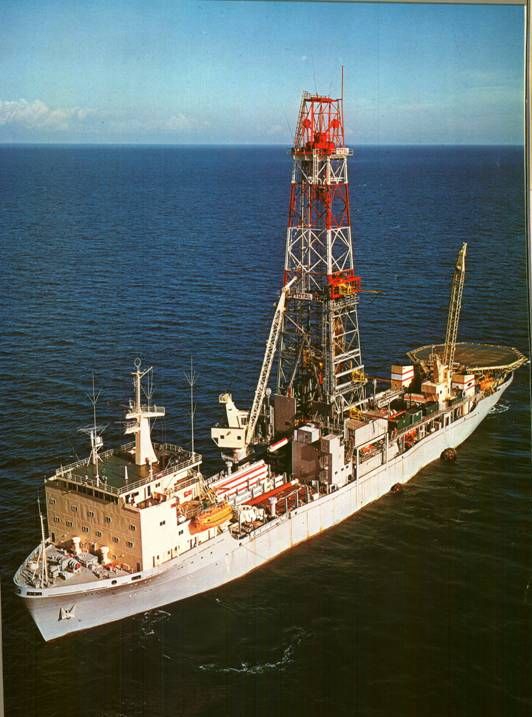
Pelican 1972
Er was nog een tweede computer die continue synchroon meedraaide en de zaak zonodig naadloos kon overnemen als de hoofdcomputer zou uitvallen. Beide computers draaiden op grote batterijsystemen zodat bij spanningsuitval de zaak nog een enige tijd zou blijven functioneren. De nauwkeurigheid van de station keeping bedroeg ongeveer 6% van de waterdiepte. Om de uitwendige krachten die op DP-schepen worden uitgeoefend te minimaliseren wordt er weather-vaning toegepast. De computer zorgt ervoor dat het schip altijd met de kop in de wind ligt. Het systeem kijkt ook naar het golfjes en soms wordt berekend dat het gunstiger is om aan swell-vaning te doen.
Als reserve waren er twee taut-wire systemen die in de periode daarvoor gebruikt werden op dergelijke schepen. Een stuk primitiever en onnauwkeuriger. Door een kraan met een automatische winch werd een staalkabel altijd strak gehouden. De kabel was bezijden het schip op de zeebodem verankerd. De positie en hoek van de draad werd continue gemeten en gaf zo informatie over eventuele drift.
Moderne boorschepen, die veel dieper kunnen boren dan toen mogelijk was, gebruiken voor de plaatsbepaling DGPS of Differentiële GPS met een nauwkeurigheid van 1 - 3 meter. Gewone GPS is te onnauwkeurig voor de huidige generatie DP-schepen.
Bij DGPS worden op bepaalde vaste punten referentiestations geplaatst. Deze meten continue de afwijkingen tussen de berekende GPS-positie en de bekende positie van het station en zenden via een telemetrie-verbinding de berekende verschillen naar het boorschip. Daar worden deze gebruikt om een zo exact mogelijk positie te berekenen
Ferry
Ooit, begin 70-er jaren was ik betrokken bij de inbedrijfstelling van het dynamic positioning systeem van Alcatel op de DP boorschepen Pelican en Havdrill die door de werf Gusto in Schiedam gebouwd werden. Dat was weer eens iets anders dan een radiostation of radar in bedrijfstellen!
In die tijd werd de positie van dit soort DP-schepen verkregen door continue metingen van akoestische transponders die rond de wellhead in een vijfhoek (pentagoon) op de zeebodem geplaatst werden. Afwijkingen van het hart van de vijfhoek werden gecorrigeerd door de drie voorwaartse geplaatste thrusters, twee achterwaartse geplaatste thrusters alsmede ook de twee voorstuwingsschroeven te regelen. De juiste dosering van de krachten van de thrusters en schroeven om het schip op zijn plaats te houden werd door de computer berekend en door middel van de variable pitch op de juiste waarde ingesteld.
Pelican 1972
Er was nog een tweede computer die continue synchroon meedraaide en de zaak zonodig naadloos kon overnemen als de hoofdcomputer zou uitvallen. Beide computers draaiden op grote batterijsystemen zodat bij spanningsuitval de zaak nog een enige tijd zou blijven functioneren. De nauwkeurigheid van de station keeping bedroeg ongeveer 6% van de waterdiepte. Om de uitwendige krachten die op DP-schepen worden uitgeoefend te minimaliseren wordt er weather-vaning toegepast. De computer zorgt ervoor dat het schip altijd met de kop in de wind ligt. Het systeem kijkt ook naar het golfjes en soms wordt berekend dat het gunstiger is om aan swell-vaning te doen.
Als reserve waren er twee taut-wire systemen die in de periode daarvoor gebruikt werden op dergelijke schepen. Een stuk primitiever en onnauwkeuriger. Door een kraan met een automatische winch werd een staalkabel altijd strak gehouden. De kabel was bezijden het schip op de zeebodem verankerd. De positie en hoek van de draad werd continue gemeten en gaf zo informatie over eventuele drift.
Moderne boorschepen, die veel dieper kunnen boren dan toen mogelijk was, gebruiken voor de plaatsbepaling DGPS of Differentiële GPS met een nauwkeurigheid van 1 - 3 meter. Gewone GPS is te onnauwkeurig voor de huidige generatie DP-schepen.
Bij DGPS worden op bepaalde vaste punten referentiestations geplaatst. Deze meten continue de afwijkingen tussen de berekende GPS-positie en de bekende positie van het station en zenden via een telemetrie-verbinding de berekende verschillen naar het boorschip. Daar worden deze gebruikt om een zo exact mogelijk positie te berekenen
Ferry
-
ferryvaneeuwen
- Berichten: 2676
- Lid geworden op: 25 nov 2004 22:59
- Locatie: Krimpen a/d IJssel
- Contacteer:
DP
Hallo Roy en Joop,
Bedankt voor het compliment! Ik denk nog altijd met genoegen terug aan die periode omdat het toch pionieren was. Bij Gusto was een apart bouwbureau bemand door jonge en enthousiaste ingenieurs, zo weg van de tiet van de prof. Bij het installeren en inbedrijfstellen van radio- en radarapparatuur had je alleen in de tekenfase kontakten met de werf en later hooguit met een bedrijfsleider als je bijvoorbeeld een ijzerwerker of timmerman nodig had. Hier was je onderdeel van een heel team. Het bouwteam van de werf had min of meer carte blanche, want niemand wist iets deze materie af. Bijna dagelijks met z'n allen biefstuk met champignons eten bij een kroeg in de buurt. Niks werfkantine. De naam van die kroeg ben ik vergeten, maar je moest over de brug over de haven en dan liep je er recht tegenaan.

De proefvaart en station keeping proeven werden in dieper water in de buurt van Noorwegen gehouden. Het was wel leuk om met de hand de DP te besturen. Dat kon met een joy stick in de DP-ruimte. Met een klein draaiknopje op de stick kon je het hele schip op de plaats laten draaien. Zijdelings wegvaren kon ook. Er was nog een joy stick met een tijdsafhankelijke besturing. Wel apart om zo in 'control' te zijn. De brug kon alleen maar toekijken wat er allemaal met het schip gebeurde.......
Ferry
Bedankt voor het compliment! Ik denk nog altijd met genoegen terug aan die periode omdat het toch pionieren was. Bij Gusto was een apart bouwbureau bemand door jonge en enthousiaste ingenieurs, zo weg van de tiet van de prof. Bij het installeren en inbedrijfstellen van radio- en radarapparatuur had je alleen in de tekenfase kontakten met de werf en later hooguit met een bedrijfsleider als je bijvoorbeeld een ijzerwerker of timmerman nodig had. Hier was je onderdeel van een heel team. Het bouwteam van de werf had min of meer carte blanche, want niemand wist iets deze materie af. Bijna dagelijks met z'n allen biefstuk met champignons eten bij een kroeg in de buurt. Niks werfkantine. De naam van die kroeg ben ik vergeten, maar je moest over de brug over de haven en dan liep je er recht tegenaan.
De proefvaart en station keeping proeven werden in dieper water in de buurt van Noorwegen gehouden. Het was wel leuk om met de hand de DP te besturen. Dat kon met een joy stick in de DP-ruimte. Met een klein draaiknopje op de stick kon je het hele schip op de plaats laten draaien. Zijdelings wegvaren kon ook. Er was nog een joy stick met een tijdsafhankelijke besturing. Wel apart om zo in 'control' te zijn. De brug kon alleen maar toekijken wat er allemaal met het schip gebeurde.......
Ferry
-
ferryvaneeuwen
- Berichten: 2676
- Lid geworden op: 25 nov 2004 22:59
- Locatie: Krimpen a/d IJssel
- Contacteer:
Prins der Nederlanden
Hallo Roy,
Op deze pagina kan je de tewaterlating in juli 1972 zien van de Prins der Nederlanden. Zelf was ik er ook, maar dat is niet te zien.....
Tewaterlating Prins der Nederlanden
Wel het geluid aanzetten!
Is dit trouwens wel de 'echte' Prins? En hoe zit dat met die onechte?
Ferry
Op deze pagina kan je de tewaterlating in juli 1972 zien van de Prins der Nederlanden. Zelf was ik er ook, maar dat is niet te zien.....
Tewaterlating Prins der Nederlanden
Wel het geluid aanzetten!
Is dit trouwens wel de 'echte' Prins? En hoe zit dat met die onechte?
Ferry